-
 Dave Vinke
Dave Vinke
- Leestijd: 5 min
- Laatst geüpdatet: 29/08/2025
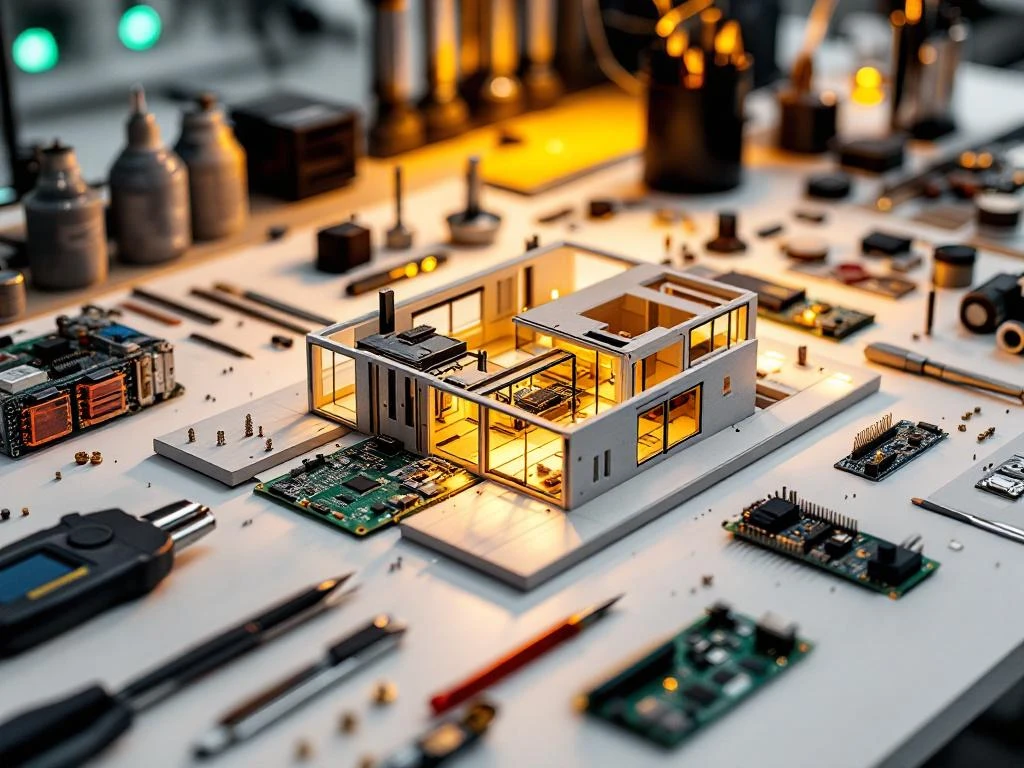
Die Programmierung beweglicher Teile in Modellen erfordert einen Mikrocontroller wie Arduino, Servomotoren, Sensoren und die entsprechende Verkabelung. Sie verwenden die Arduino IDE mit C++ Programmierung, um die Bewegungen zu steuern. Durch das Anschließen der Servomotoren an die Arduino-Pins und das Schreiben des entsprechenden Codes können Sie verschiedene Bewegungsmuster wie Drehen, Neigen und Oszillieren erstellen. Dies hilft Ihnen dabei, dynamische Modellbau-Projekte zu schaffen, die zum Leben erwachen.
Was benötigen Sie für die Programmierung beweglicher Teile?
Für bewegliche Teile in Modellen benötigen Sie einen Mikrocontroller (meist Arduino), Servomotoren, Sensoren, Jumper-Kabel, ein Steckbrett und eine Programmierumgebung. Diese Komponenten arbeiten zusammen, um kontrollierte Bewegungen zu erzeugen, die Ihr Modell zum Leben erwecken.
Der Arduino-Mikrocontroller bildet das Gehirn Ihres Projekts. Es ist ein kleiner Computer, der Signale an Ihre Motoren sendet und Eingaben von Sensoren empfängt. Arduino-Boards sind perfekt für Anfänger, da sie benutzerfreundlich sind und über umfangreiche Online-Dokumentation verfügen.
Servomotoren sind ideal für präzise Bewegungen. Sie können sich zu spezifischen Positionen drehen und dort verharren. Dies macht sie perfekt für bewegliche Teile wie Roboterarme, rotierende Plattformen oder Neigungsmechanismen in Ihren Modellen.
Sensoren wie Ultraschall-Abstandssensoren, Lichtsensoren oder Drucksensoren geben Ihrem Modell die Möglichkeit, auf die Umgebung zu reagieren. Dadurch wird Ihr Modellbau-Projekt interaktiv und reagiert auf Bewegung, Licht oder Berührung.
Für die Verkabelung verwenden Sie Jumper-Kabel und ein Steckbrett. Diese helfen Ihnen dabei, alle Komponenten sicher miteinander zu verbinden, ohne dass Sie löten müssen. Dies macht Experimente und Anpassungen viel einfacher.
Wie schließen Sie Servomotoren an einen Arduino an?
Das Anschließen von Servomotoren an Arduino ist einfach: Verbinden Sie das rote Kabel mit 5V, das braune oder schwarze Kabel mit GND und das orange oder gelbe Signalkabel mit einem digitalen Pin (wie Pin 9). Stellen Sie sicher, dass Ihr Arduino ausreichend Strom für Ihre Servomotoren hat.
Beginnen Sie mit der Identifizierung der drei Kabel Ihres Servomotors. Das rote Kabel ist immer die Stromversorgung und wird an den 5V-Pin Ihres Arduino angeschlossen. Das dunkle Kabel (braun oder schwarz) ist die Masse und wird mit einem GND-Pin verbunden.
Das Signalkabel (meist orange, gelb oder weiß) überträgt die Steuersignale. Schließen Sie dieses an einen PWM-fähigen digitalen Pin an, wie Pin 9 oder 10. Diese Pins können die speziellen Pulssignale erzeugen, die Servomotoren benötigen.
Achten Sie auf die Stromversorgung, wenn Sie mehrere Servomotoren verwenden. Kleine Servos können meist direkt vom Arduino gespeist werden, aber für größere Servos oder mehrere Motoren benötigen Sie eine externe Stromversorgung. Verwenden Sie dann einen separaten 5V-Adapter und verbinden Sie die Massen von Arduino und externer Stromversorgung miteinander.
Testen Sie immer Ihre Verbindungen, bevor Sie den Code hochladen. Lose Kabel sind die häufigste Ursache für Probleme. Verwenden Sie ein Steckbrett für stabile Verbindungen und markieren Sie Ihre Kabel, damit Sie wissen, welches Kabel wohin führt.
Welche Programmiersprache verwenden Sie für bewegliche Modelle?
Für bewegliche Modelle verwenden Sie die Arduino IDE mit C++ Programmierung. Diese Umgebung ist speziell für Mikrocontroller entwickelt und enthält nützliche Bibliotheken wie Servo.h für die Motorsteuerung. Die Sprache ist für Anfänger zugänglich, aber mächtig genug für komplexe Projekte.
Die Arduino IDE laden Sie kostenlos von der Arduino-Website herunter. Das Programm bietet eine einfache Benutzeroberfläche, in der Sie Code schreiben, überprüfen und auf Ihr Arduino-Board hochladen. Die integrierten Beispiele helfen Ihnen dabei, schnell mit Grundprojekten zu beginnen.
C++ für Arduino ist eine vereinfachte Version der vollständigen C++-Sprache. Sie müssen nicht alle komplexen Aspekte kennen. Die wichtigsten Funktionen sind setup(), die einmal beim Start ausgeführt wird, und loop(), die kontinuierlich wiederholt wird.
Bibliotheken machen das Programmieren viel einfacher. Für Servomotoren verwenden Sie die Servo-Bibliothek mit einfachen Befehlen wie myservo.write(90), um zu 90 Grad zu drehen. Für Sensoren gibt es Bibliotheken, die komplexe Berechnungen für Sie durchführen.
Ein einfaches Beispiel sieht so aus:
#include <Servo.h>
void setup() {
}
myservo.write(0);
myservo.write(180);
}
Wie programmieren Sie verschiedene Arten von Bewegungen?
Verschiedene Bewegungen programmieren Sie durch Variieren von Servo-Positionen, Timing und Geschwindigkeit. Für Drehbewegungen verwenden Sie write()-Befehle mit verschiedenen Winkeln, für Oszillation kombinieren Sie for-Schleifen mit delay-Funktionen, und für fließende Bewegungen erhöhen Sie schrittweise die Position.
Drehende Bewegungen erstellen Sie, indem Sie den Servo zu verschiedenen Positionen steuern. Für eine vollständige Rotation schreiben Sie Code, der den Servo von 0 zu 180 Grad drehen lässt und wieder zurück. Die Verzögerung zwischen den Schritten bestimmt die Geschwindigkeit.
Oszillierende Bewegungen erstellen Sie mit for-Schleifen, die hin und her gehen:
for(int pos = 0; pos <= 180; pos += 1) {
delay(15);
for(int pos = 180; pos >= 0; pos -= 1) {
delay(15);
}
Für sequenzielle Bewegungen verwenden Sie mehrere Servos, die nacheinander bewegen. Dies erstellen Sie, indem Sie jeden Servo separat ansteuern mit verschiedenen Verzögerungszeiten dazwischen. So können Sie komplexe Bewegungsmuster erstellen, die an Tanz erinnern.
Geschwindigkeitskontrolle führen Sie durch Anpassen des delay-Werts durch. Kleinere delays machen Bewegungen schneller, größere delays machen sie langsamer. Für sehr fließende Bewegungen verwenden Sie delays von 10-20 Millisekunden zwischen kleinen Schritten.
Erweiterte Bewegungen kombinieren Sensoren mit Servo-Steuerung. Ein Ultraschallsensor kann beispielsweise einen Servo bewegen lassen, wenn jemand in die Nähe kommt, wodurch Ihr Modell interaktiv wird.
Wo finden Sie die besten Teile für Ihre beweglichen Modelle?
Für Qualitätsteile wählen Sie Lieferanten, die auf Elektronik und Modellbau-Komponenten spezialisiert sind. Suchen Sie nach Arduino-Boards, Servomotoren und Sensoren von vertrauenswürdigen Marken. Bei uns finden Sie ein umfangreiches Sortiment an Modellbau-Materialien für alle Ihre beweglichen Projekte.
Qualität ist bei Servomotoren wichtig, da günstige Varianten oft ungenau sind oder schnell kaputtgehen. Suchen Sie nach Servos mit Metallgetrieben für schwerere Anwendungen und Plastikgetrieben für leichtere Projekte. Marken wie SG90 für kleine Projekte und MG995 für kraftvollere Anwendungen sind zuverlässige Wahlen.
Arduino-Boards kaufen Sie am besten als originale oder offizielle Klone. Sehr günstige Nachbau-Boards können Probleme mit der USB-Verbindung oder Stromversorgung verursachen. Ein guter Arduino Uno oder Nano bildet die Basis für Jahre an Projektvergnügen.
Sensoren und Zubehör wie Steckbretter, Jumper-Kabel und Widerstände kaufen Sie am besten in Sets. Dies spart Geld und sorgt dafür, dass Sie immer die richtigen Teile zur Hand haben für neue Projekte.
Wir bieten automatische Rabatte bei mehreren Artikeln, was perfekt ist, wenn Sie verschiedene Teile für ein großes Projekt benötigen. Unsere Rabattregelung gilt auch für die neuesten Produkte, sodass Sie immer den besten Preis für Ihre Modellbau-Abenteuer erhalten.
Durch die Wahl von Qualitätsteilen investieren Sie in Projekte, die lange halten und zuverlässig funktionieren. Dies macht den Unterschied zwischen Frustration und Vergnügen beim Bau Ihrer beweglichen Modelle.
Frequently Asked Questions
Wie viele Servomotoren kann ich maximal an einen Arduino anschließen?
Ein Standard-Arduino Uno kann theoretisch bis zu 12 Servos ansteuern, aber in der Praxis sind 4-6 Servos realistischer aufgrund der Strombegrenzung. Für mehr Servos benötigen Sie eine externe Stromversorgung oder einen Arduino Mega, der mehr Pins und bessere Stromverteilung hat.
Warum bewegt sich mein Servomotor ruckartig anstatt fließend?
Ruckartige Bewegungen entstehen meist durch zu große Schritte in Ihrem Code oder unzureichende Stromversorgung. Verwenden Sie kleinere Winkelschritte (1-2 Grad) mit delays von 15-20ms zwischen jedem Schritt und überprüfen Sie, ob Ihr Servo ausreichend Strom über einen externen 5V-Adapter erhält.
Kann ich bewegliche Modelle auch drahtlos steuern?
Ja, Sie können drahtlose Steuerung mit Modulen wie HC-05 Bluetooth oder ESP32 WiFi hinzufügen. Damit können Sie Ihr Modell über eine Smartphone-App oder Computer steuern. Sie benötigen jedoch zusätzliche Programmierkenntnisse für die Kommunikation zwischen Geräten.
Was mache ich, wenn mein Arduino während der Ausführung von Bewegungen hängt?
Arduino-Hänger entstehen oft durch endlose Schleifen ohne delays oder zu viele Servos, die gleichzeitig bewegen. Fügen Sie immer delay()-Befehle in Ihre Schleifen hinzu und testen Sie mit einem Servo einzeln. Setzen Sie Ihren Arduino zurück und laden Sie einen einfachen Testcode hoch, um die Ursache zu finden.
Wie programmiere ich Bewegungen, die auf mehrere Sensoren gleichzeitig reagieren?
Verwenden Sie if-else-Anweisungen oder switch-case-Strukturen, um verschiedene Sensorkombinationen zu behandeln. Lesen Sie alle Sensoren am Anfang Ihrer loop()-Funktion und speichern Sie die Werte in Variablen. So können Sie komplexe Entscheidungslogik basierend auf mehreren Eingaben erstellen.
Welche häufigen Fehler sollte ich beim Programmieren beweglicher Modelle vermeiden?
Vergessen Sie niemals delay()-Funktionen in Schleifen (dies kann Ihren Arduino zum Hängen bringen), schließen Sie immer die Massen (GND) aller Komponenten aneinander an und testen Sie jeden Servo einzeln, bevor Sie komplexe Bewegungen programmieren. Auch wichtig: verwenden Sie immer die richtigen Pin-Nummern in Ihrem Code.
Wie kann ich die Bewegungen meines Modells speichern und später wiederholen?
Sie können Bewegungssequenzen in Arrays mit Winkelpositionen und Timing speichern. Verwenden Sie EEPROM-Speicher für permanente Speicherung oder SD-Karten-Module für komplexere Sequenzen. Erstellen Sie Funktionen, die diese gespeicherten Bewegungen abspielen können, wenn Sie sie benötigen.
Inhaltsverzeichnis
Viel gesehen


Mehr Blogs

Welche Video-Tutorials sind für den Modellbau unverzichtbar?

Wie teilt man Modellbau-Wissen mit anderen?
Was sind intelligente Modellbaulösungen?